
苏州纳米所张珽团队AM研究进展:具有Janus结构的高机械强度、高选择性柔性力学传感器
发布日期:2023-06-10 浏览次数: 【大中小】 【关闭】
兼具优异机械性能与高选择性响应能力,是促进柔性力学传感器件走向实际应用的关键难点之一。现有柔性传感器件主要是以敏感材料均质薄膜来构建,其组成单元各向同性的微观结构,使其在受弯曲、压缩或拉伸等不同类型力时具有相似的响应模式,造成器件输出感知信号相近并容易产生相互干扰等问题,同时优异机械性能及自修复等特性对柔性器件在复杂环境下应用稳定性具有重要意义。
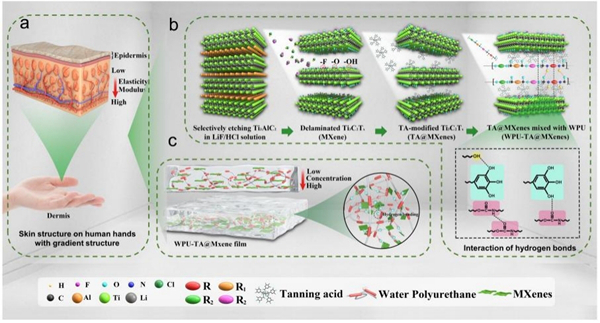
图1. 具有Janus结构PU-TA@MXene敏感薄膜梯度结构及制备流程示意图
近期,中国科学院苏州纳米技术与纳米仿生研究所张珽研究员团队提出以人体皮肤梯度结构为仿生原型,利用单宁酸(TA)修饰后MXene(Ti3C2Tx)二维片层在水性聚氨酯(PU)中自由沉降相分离过程,制备了具有PU层内Ti3C2Tx相梯度分布仿生“非对称(Janus)”结构复合敏感薄膜材料(图1,PU-TA@MXene)。一方面,末端带有丰富羟基官能团TA分子于MXene与PU基底之间形成大量氢键/共价键侨联,利用这些键合作用在受力过程中断裂和重组性质,赋予了敏感薄膜优异的机械强度和自修复性能(断裂伸长率达2056.67%、拉伸强度达50.78 MPa、自修复后机械强度保持率为86%),使敏感材料在复杂环境长期使用时信号输出稳定性得到提升。另一方面,仿生“非对称(Janus)”结构赋予了柔性力学传感器对内/外异向弯曲、压力和拉力具有多功能选择性响应能力(图2),与机器学习算法技术相结合能实现对不同类型力>96%识别效率。进一步,将此高机械强度、选择性响应柔性力学传感器件应用于存在多状态实时转换的人体运动关节监测方面,可实现对乒乓球、篮球、羽毛球等需要大量关节切换动作的运动项目实时监控;同时,该柔性力学传感器异向弯曲选择性响应能力,也可应用于蛇形智能装备在救援废墟等复杂环境中,通过实时识别自身运动方向和角度来探索和建立未知路径轨迹(图3)。
该工作以Multifunctional Flexible Sensor Based on PU-TA@MXene Janus Architecture for Selective Direction Recognition为题发表在Advanced Materials,文章第一作者是中国科学院苏州纳米技术与纳米仿生研究所研究生白菊和谷文,通讯作者是李铁项目研究员和张珽研究员。该研究得到国家重点研发计划、国家自然科学基金(杰青/面上)、中科院青促会、江西省杰青、江苏省面上基金等支持。
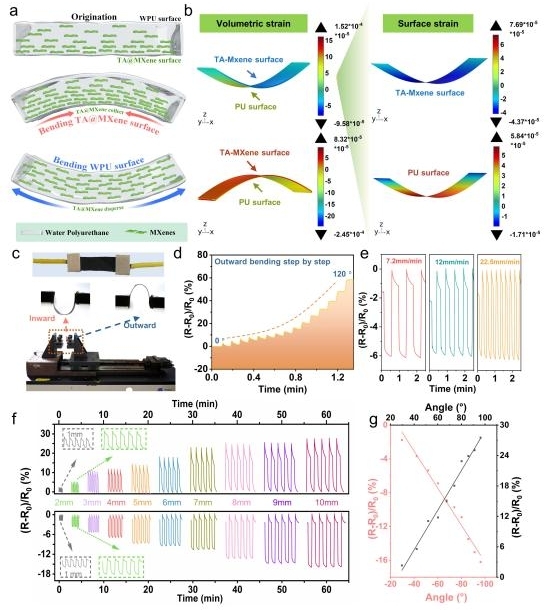
图2. 基于PU-TA@MXene敏感薄膜柔性传感器感知机理及选择性响应性能图
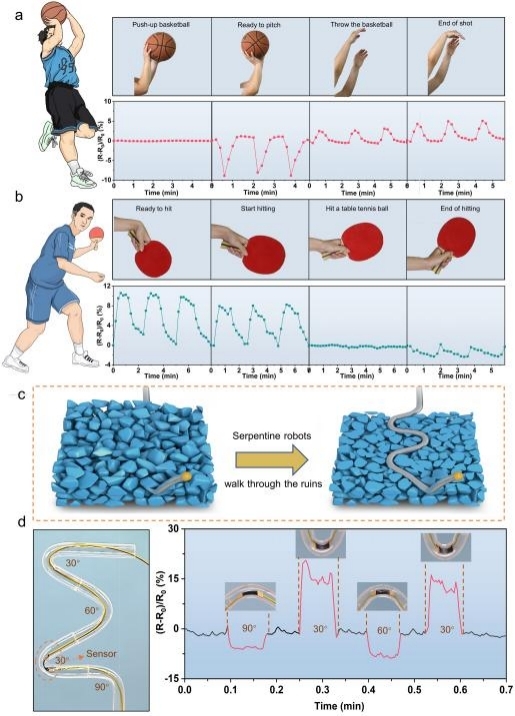
图3. 柔性传感器在多状态实时转换运动关节监测和装备未知路径探测应用性能图
该工作是团队关于多功能柔性传感器相关研究的最新进展之一。另外,团队也制备了一系列性能优异的多功能柔性传感器件,主要包括发展了柔性器件仿手指表皮一体叠层界面结构设计方法,实现单一柔性触觉传感器件对静态压力、静态摩擦力及动态摩擦力选择性响应能力(Research, 2020, 2020, 8910692; Nanoscale, 2019, 11, 5737.),结合与神经识别模式相匹配脉冲频率电信号转换与机器学习数据处理技术,赋予了仿生假肢手、仿真机器人等智能装备对物体冷/热、干/湿状态(Acc. Chem. Res. 2019, 52, 288; Small, 2018, 14(36), 1703902; Adv. Sci. 2017, 4, 1600404.)及材质与种类(InfoMat, 2023, INFOMAT-2023-0042, Accepted; npj Flexible Electronics, 2022, 6, 46; 中国科学: 技术科学, 2022, 62.)等类人手精细感知能力(图4)。

图4. 仿手指皮肤一体化叠层界面结构设计柔性触觉传感器及其应用
 扫一扫关注我们
扫一扫关注我们