
苏州纳米所邸江涛研究员等在仿生人工肌肉研究方面取得新进展
发布日期:2021-03-19 浏览次数: 【大中小】 【关闭】
随着软体机器人和智能可穿戴电子设备的飞速发展,仿生智能纤维人工肌肉的研究和应用近来被广泛研究。人工肌肉纤维具有与生物肌肉纤维相类似的功能和结构,在适当的外界刺激方式下,产生仿生物肌肉的感知传感和反馈驱动动作。其在软体机器人、智能穿戴以及辅助医疗等领域有重要的应用前景。针对全固态人工肌肉纤维驱动器和传感器的结构设计、功能优化及应用场景展示等问题,中科院苏州纳米所邸江涛、李清文研究团队开展了长期的研究,近期取得了新进展。
在目前研究的众多人工肌肉纤维中,基于离子嵌入/脱出的电化学人工肌肉纤维由于其低的工作电压,无明显热效应等特点而引起科研人员的浓厚兴趣。但是基于目前的研究现状,电化学人工肌肉纤维仍然面临着一些挑战。例如,目前的电化学人工肌肉纤维主要是基于液态的工作体系,无法在空气中稳定的工作,这严重限制了电化学人工肌肉的应用范围。
针对上述挑战,中科院苏州纳米所邸江涛、李清文团队从材料选择和结构设计出发,构筑了一种离子液体填充纳米纤维鞘层的电化学人工肌肉纤维。
该电化学人工肌肉纤维能够在空气中稳定工作,其结构以及工作原理如图1所示。施加低电压时,阴阳离子分别超正负电极迁移并嵌入,使得人工肌肉纤维收缩。当移除电压时,阴阳离子从电极脱出,人工肌肉纤维恢复原长。
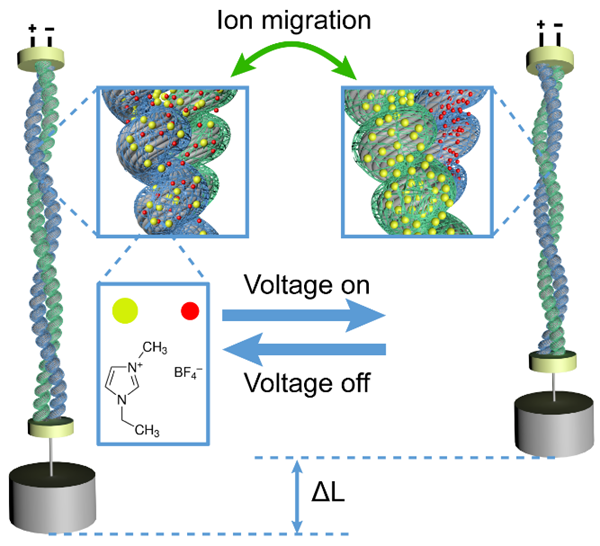
图1.电化学人工肌肉的结构以及工作原理示意图
首先他们利用原位静电纺丝技术,在碳纳米管(CNT)纤维表面均匀沉积一层PVDF-HFP纳米纤维。接着将PVDF-HFP/CNT复合纤维加捻成螺旋结构,通过自绞合、剪切等分别构成正负电极,浸泡离子液体后即形成电化学人工肌肉(图2)。
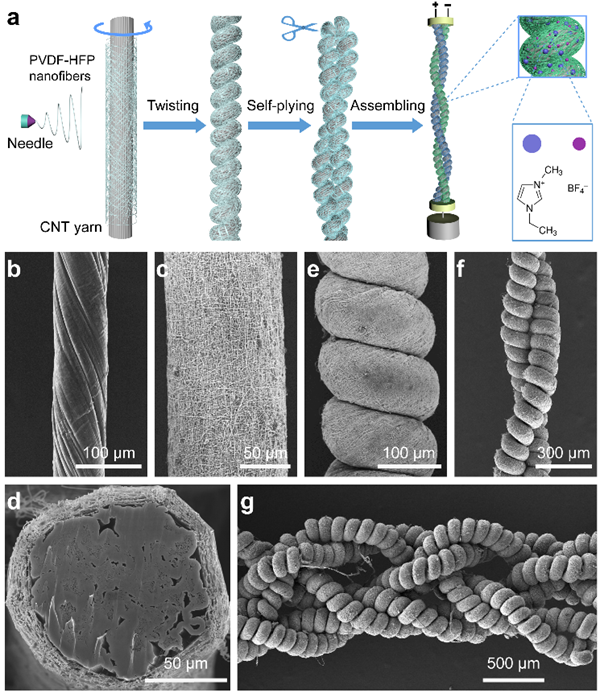
图2. 电化学人工肌肉纤维的制备流程及结构表征. a.制备流程;b. CNT 纤维;c.PVDF-HFP/CNT纤维;d. PVDF-HFP/CNT纤维截面;e.加捻后的PVDF-HFP/CNT纤维;f.自绞合后的PVDF-HFP/CNT纤维;g.集束后的PVDF-HFP/CNT纤维.
PVDF-HFP纳米纤维层具有大量的孔隙结构,可以储存大量的离子,同时具有良好的离子电导率。此外其还具有良好的机械性能,可以作为两个电极之间的隔膜,从而避免了短路现象。离子液体具有宽的电化学窗口,低的蒸汽压。因此离子液体填充纳米纤维鞘层的电化学人工肌肉具有良好的稳定性。其可以在宽范围的环境湿度和温度下、长期储存在空气中,以及打结后均能够稳定工作(图3)。

图3. 电化学人工肌肉纤维的稳定性表征.
基于该人工肌肉纤维良好的稳定性以及驱动性能,他们将这种稳定的电化学人工肌肉纤维作为驱动组件应用到仿生机器人器件中。图4展示了仿生手臂和三爪抓手。通过集束增加输出力,人工肌肉纤维可以提起自身重量近百倍的小哑铃。将人工肌肉纤维与弹簧集成制备的三爪抓手,像人的手一样可以抓取、保持、释放重物。
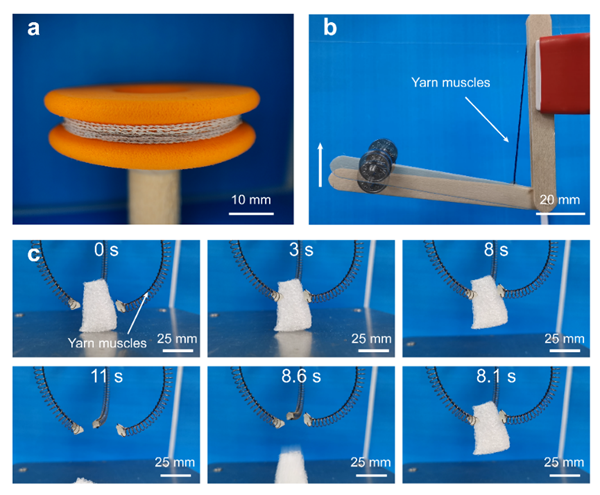
图4. 电化学人工肌肉纤维的应用展示
该成果以Strong and Robust Electrochemical Artificial Muscles by Ionic-Liquid-in-Nanofiber-Sheathed Carbon Nanotube Yarns为题发表在small上(https://doi.org/10.1002/smll.202006181)。论文第一作者是博士生任明,通讯作者为邸江涛研究员和李清文研究员,合作者包括香港理工大学陈韦教授。感谢邓捷和孙一洋同学提供的帮助。
此外,团队成员发现单根碳纳米管纤维在裹上凝胶电解质后具有独特的压电离子效应,对应变极其敏感,经历不对称拉伸时可在纤维两端输出毫伏级别高分辨率、低噪声的电压。基于此制备了一种新型全固态压电离子纤维作为无源应力传感器,其输出传感电压的大小可通过拉伸频率和拉伸应变来调节,具有宽频(0.1-10 Hz)响应性和宽应变(1-80%)响应性。该团队将此压电离子纤维无源应力传感器编入手套中,制备智能手套,可有效识别手势动作并与机械手进行良好的人机交互。该成果以Gel-Electrolyte-Coated Carbon Nanotube Yarns for Self-Powered and Knittable Piezoionic Sensors为题发表在ACS Applied Electronic Materials上(https://dx.doi.org/10.1021/acsaelm.0c01044)。论文第一作者是北航李敏教授和课题组博士生乔健,通讯作者为邸江涛研究员和李清文研究员。
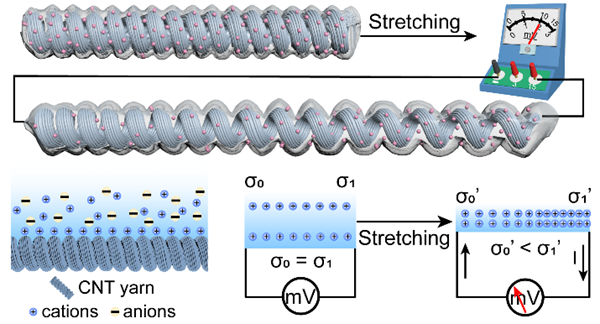
图5. 碳纳米管纤维新型压电离子纤维结构示意图及其压电离子效应产生机理

图6. 编入压电离子纤维无源应变传感器的智能手套与机械手的人机交互
以上工作得到了工作得到了国家重点研发计划(2020YFB1312902,2016YFA0203301)、国家自然科学基金(21975281, 21773293,21603264)等科研项目的支持。
 扫一扫关注我们
扫一扫关注我们